
3 system structure
Functionally speaking, the robotic arc welding off-line programming system has increased the function of arc welding compared with the general offline programming system. Therefore, the function includes both the functions of the general offline programming system and the support for arc welding. This article has improved the function of each function module.
The overall structure of the robot-executed arc welding off-line programming system is shown in Figure 3.
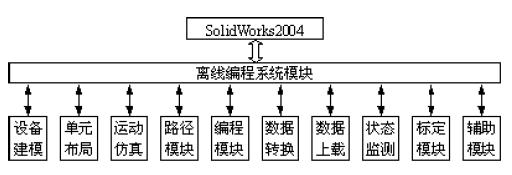
Figure 3 Functional module division
The following is a general introduction to the function of each module.
1) Equipment modeling
This module is used to define peripherals such as robots, welding workpieces, positioners, etc.: Define the assembly created by SolidWorks as various devices, define the joint motion type of the device, define the device tool parameters, and set the kinematic parameters of the device. Create a library of peripheral devices such as robot equipment libraries and positioners.
2) Work unit layout
The system should provide the ability to build a work unit consisting of multiple devices, ie the work unit layout function. In this module, functions for calling existing devices, defining pose relationships between devices, and organizing coordinated motion devices are provided. Create a work unit library. Figure 4 shows an example of a built-in unit of work.
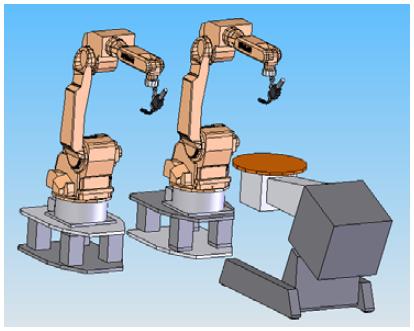
Figure 4 Work unit simulation example diagram
3) Motion Simulation This module mainly provides the following functions: joint motion of various equipments, return to zero motion; target point motion, circular motion, path movement of single robot equipment and coordinated motion equipment; path motion motion mode and simulation Step size setting, etc.
4) The path path function is a major feature of off-line programming, so that the motion process of the robot tool can be recorded visually for user's editing. For the welding task, this paper realizes the function of recording the site information by using the path, including the robot auxiliary axis joint angle value at each path point, the TCP pose under the meaning of the robot base coordinate, and the welding parameters.
5) Programming This article provides an arc welding off-line programming language (OLPWL) based on existing programming languages ​​combined with soldering applications. Users can use this language for offline programming. The language is close to the programming language of the actual arc welding robot, which is convenient for programmers who are familiar with robot operation and can train programmers. The module is an off-line programmer that integrates editing, debugging and simulation functions.
6) Data Conversion The general offline programming system provides a module for converting with the actual robot program, that is, a program conversion module. However, due to the different programming languages ​​adopted by different robot manufacturers, the biggest difficulty lies in the conversion of the robot motion data, that is, the motion path point data is converted into the path point (or joint angle) data used by the actual robot program, which is different for different robot manufacturers. The description method and storage format may not be able to decipher this part of the information. The IGRIP software also only provides direct program conversion with IGM and MotoMan robots. This paper proposes a method for converting motion path point data into a data format that is easy for all robot programmers to understand, and the actual robot program generates it separately based on this data. This article specifies a general path data description method.
7) The data uploading offline programming system should also be able to convert the robot program obtained from the teaching into the path in the simulation working unit. For the above reasons, this paper proposes a data upload function to upload the general path data specified in this paper to offline programming. In the system, the path is generated.
8) Condition Monitoring This module includes joint over-limit inspection, joint movement speed and acceleration over-limit inspection, and collision detection. In the past, the offline programming system detected the over-limit of the joint angle by the pre-check method. This method can not form an intuitive feeling for the change of the joint angle of the entire path of the robot. It does not help to adjust the path point position of the joint overrun. This paper takes a method to monitor the state change of the robot during dynamic motion. The prompt information is given, and the motion process of the robot is not terminated.
9) Calibration In order to ensure the consistency of the graphic work unit model and the actual work unit model, the calibration of the actual work unit is required.
10) Auxiliary module For the special application of arc welding, this paper develops the database management function of arc welding parameters.
4 Conclusion This article <br> <br> developed to run on the platform of SolidWorks inexpensive and professional arc welding offline programming system. The system has strong modeling ability and solves the problem that the previous system can only extract the geometric information of the workpiece from some simple workpieces due to insufficient modeling ability. Using object-oriented technology, the object model of robot arc welding offline programming and simulation system was established, and a more complete robot arc welding offline programming and simulation system was developed.
Previous page
Set Rule for Guide Rail, Guide Rail Locator, Location Rule of Guide Rail, Locating Rule of Guide Rail
We carry high quality Set Rule for Guide Rail for all major elevator and escalator brands
for OTIS Elevators, ThyssenKrupp Elevators, Schindler Elevators, KONE Elevators, Mitsubishi Elevators, Fujitec Elevators, Hitachi Elevators, Toshiba Elevators, Fuji Elevators, Express Elevators, Sigma Elevators, LG Elevators, Hyundai Elevators, BLT Elevators, CANNY Elevators, SJEC Elevators, KOYO Elevators
Set Rule for Guide Rail, Guide Rail Locator, Location Rule of Guide Rail, Locating Rule of Guide Rail
CEP Elevator Products ( China ) Co., Ltd. , https://www.zjelevatordoorsystem.com